2010/08/17(火)mbedでロータリーエンコーダを読んでみた
2010/08/18 05:53
このライブラリはロータリーエンコーダのパルス数を数えるためのものなようです。
ロータリーエンコーダは使う予定があるので、試しに使ってみました。
ロータリーエンコーダとは
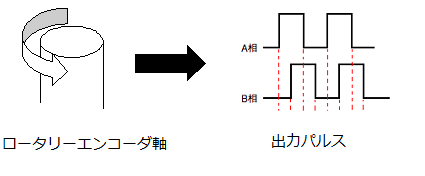
ロータリーエンコーダとは回転量を測定するために使われるセンサです。安価で扱いが簡単なインクリメンタル式と高価なアブソリュート式の二種類があり、今回扱うものはインクリメンタル式の方です。*1インクリメンタル式のロータリーエンコーダは軸が一定量回転するごとに位相がずれたA相とB相のパルスを出力します。A相とB相は回転方向によって出力タイミングが逆の関係になるため、どちらの方向へどれだけ回っているのかということを計測することができるわけですね。
また、A相、B相の立ち上がり立下りから1周期分のパルス出力で4個の分解能を取ることができるため、エンコーダ分解能は出力パルスの4倍ということになります。
つまり、360度回転する間に24パルス出力するロータリーエンコーダであれば
360[deg] / (24[pulse]*4) = 3.75[deg]
の分解能があると計算できます。
QEIライブラリを使ってみる
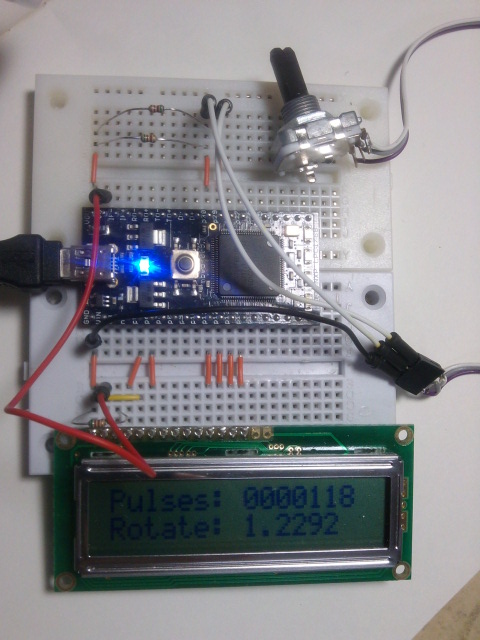
QEIはQuadrature Encoder Interfaceの略でインクリメンタル式のロータリーエンコーダを読むためのライブラリです。今回はとりあえず手元にあった秋月で200円で売っているエンコーダの出力パルス数を計測し、キャラクタLCDに表示するものを作ってみました。
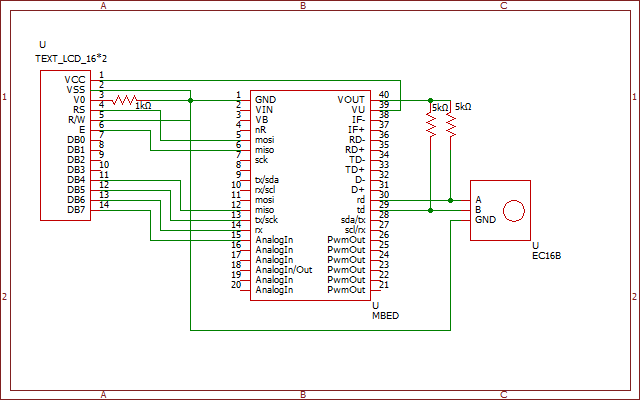
回路図
プログラム
QEI_test
#include "QEI.h"
#include "TextLCD.h"
TextLCD lcd(p5, p6, p11, p12, p13, p14); // rs, e, d0-d3
Serial pc(USBTX, USBRX);
#define ROTATE_PER_REVOLUTIONS 24
//Use X4 encoding.
QEI wheel(p30, p29, NC, ROTATE_PER_REVOLUTIONS, QEI::X4_ENCODING);
//Use X2 encoding by default.
//QEI wheel (p30, p29, NC, 624);
int main() {
while(1){
wait(0.1);
lcd.printf("Pulses: %07d\n", wheel.getPulses());
lcd.printf("Rotate: %04.3f\n", (double)wheel.getPulses()/(ROTATE_PER_REVOLUTIONS*4));
}
}
それでは要点の説明です。
#define ROTATE_PER_REVOLUTIONS 24 //Use X4 encoding. QEI wheel(p30, p29, NC, ROTATE_PER_REVOLUTIONS, QEI::X4_ENCODING);QEIのインスタンスを生成しています。
第一、第二引数にA相のピン、B相のピンを設定します。
第三引数はオプションで回転数を数えるピンがあればそれを設定するようです。
第四引数はロータリーエンコーダが一回転あたり何パルス出力するかを設定しています。*2
第五引数はモードを設定しています。X4_ENCODINGモードであればロータリーエンコーダの分解能を完全に使って1パルス出力で4カウント増加します。X2_ENCODINGモードであれば、ロータリーエンコーダの分解能を半分にして1パルス出力で2カウント増加します。おそらくX2_ENCODINGモードにすると周波数が高い時に取りこぼしが少なくなると考えられるので、分解能があまり必要でなく精度が必要な場合はこちらを使うという風に使い分けるのだと思います。
lcd.printf("Pulses: %07d\n", wheel.getPulses());
lcd.printf("Rotate: %04.3f\n", (double)wheel.getPulses()/(ROTATE_PER_REVOLUTIONS*4));
キャラクタLCDに出力しています。1行目ではwheel.getPulses()メソッドによって初期状態から現在のどちら方向にどのくらい回ったかというのを取得しています。
2行目では軸が何回転したかというのを計算して表示しています。
終わりに
機械接点式のロータリーエンコーダであるため、チャタリングというノイズがのり速く回したりするとどんどん実際の回転数とズレが出てきてしまいますね。X2_ENCODINGモードだとちょっとましになるのかな…?準備が出来たら次はこのモータで計測を行ってみたいと思ってます。