2011/09/04(日)ArduinoでRS485通信をしてみる
2011/09/04 15:36
LTC485CN8を使ってみる
回路図
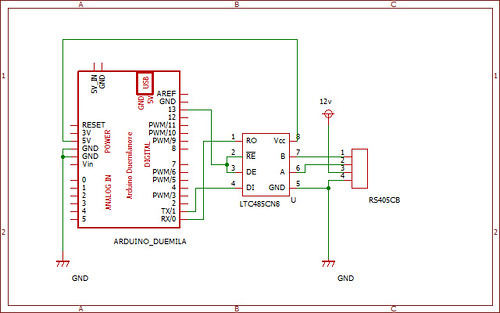
説明
LTC485CN8はDE,RE端子の状態によって送信、受信のモードを切り替えて使います。つまりマイコンは,DE,REに直結した端子をHIGHにしてから送信、LOWにしてから受信というように処理を行えばいいわけですね。
あとはまぁ別に普通のシリアル通信です。
余談となってしまうんですが,RS405CBの設定で返信ディレイ時間が用意されている理由は、送受信の切り替えに時間がかかるマイコンを使ったときに調整するためなのかなぁと思ってます。
RS405CBはFutabaのロボット用サーボの開発成果を全て盛り込んだという触れ込みだけあって、色々気が使われてる印象がありますね。
プログラムはちょっと長いので続きを読むに置いときました。
参考という名のパクリ元
RS-485の接続(爪車さん)FT232RLでRS-485通信(爪車さん)
爪車さんはシミュレータを使いこなしつつ二足歩行ロボをやってらっしゃる凄い方です。