2011/09/04(日)ArduinoでRS485通信をしてみる
2011/09/04 15:36
LTC485CN8を使ってみる
回路図
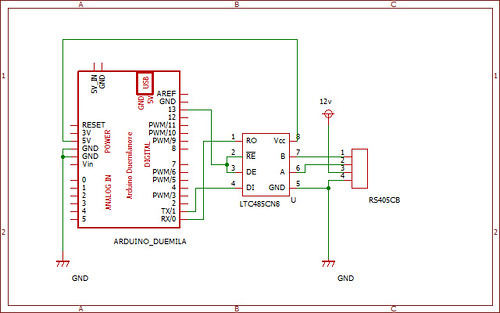
説明
LTC485CN8はDE,RE端子の状態によって送信、受信のモードを切り替えて使います。つまりマイコンは,DE,REに直結した端子をHIGHにしてから送信、LOWにしてから受信というように処理を行えばいいわけですね。
あとはまぁ別に普通のシリアル通信です。
余談となってしまうんですが,RS405CBの設定で返信ディレイ時間が用意されている理由は、送受信の切り替えに時間がかかるマイコンを使ったときに調整するためなのかなぁと思ってます。
RS405CBはFutabaのロボット用サーボの開発成果を全て盛り込んだという触れ込みだけあって、色々気が使われてる印象がありますね。
プログラムはちょっと長いので続きを読むに置いときました。
参考という名のパクリ元
RS-485の接続(爪車さん)FT232RLでRS-485通信(爪車さん)
爪車さんはシミュレータを使いこなしつつ二足歩行ロボをやってらっしゃる凄い方です。
2011/02/12(土)Duino-Vで手抜きライントレーサつくったよ
2011/02/14 02:31
Duino-Vというのは,小型で安価で前方のUSBスティック部分から書き込みができる*1シンプルでステキなArduinoです.
詳しくはLynx-EyEDさんの記事をご参照ください.
見た目


秋月のCタイプの基板(72*48mm)に部品を全て乗せまして,手のひらサイズです.
配線があっちこっち飛んでて酷いものですが,全体としてのフォルムは可愛いといえなくもないかなと思っています.これを親バカと言います.

ちなみに私はDuino-Vの足として1*8で足の長いピンフレームの端っこをやすりがけしたのを付けています.
Arduino的に上からジャンパ線で引き出せる上にブレッドボードにもさせるので,上にメスか下にオスかで迷ったときはよくこんな風にしています.
ちょっと説明
電源
単四電池を4本直列に繋いだものをモータ用の電源にして,それをレギュレータで5Vに落としてその他の部品を与えています.センサ

スイッチサイエンスから購入したQRE1113を基板の固定穴に取り付けています.キャスタはタミヤのボールキャスタを使用しました.
下の方のカオスは見ぬフリをするのが,ここでのマナーです.
足回り
駆動用のモータには連続回転化した小型のサーボモータを使ってます.通常のサーボモータはPWMで角度を指定することができるモータですが,小改造*2を施すことでPWMで回転方向,速度をなんとなーく制御できるモーターにすることができます.小さくてパワーが出せるし制御回路が要らないし,ちょっとした工作のときに重宝するんですよね.
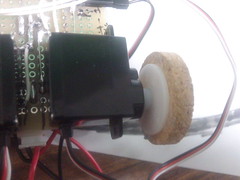
小改造したサーボモータにホームセンターで買ってきた丸いコルクを両面テープで貼り付け,さらにそのサーボを基板に両面テープで貼り付けて足回りは完成です.これはひどい手抜き.
結果
機構と制御がテキトーなおかげで,すっごいガクガクしながら辛うじて線の上を進んで行きます.動画載せたいな….