検索条件
全2件
(1/1ページ)
public static void main(String[] args) {
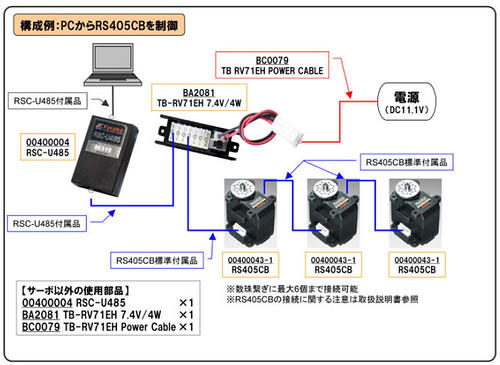
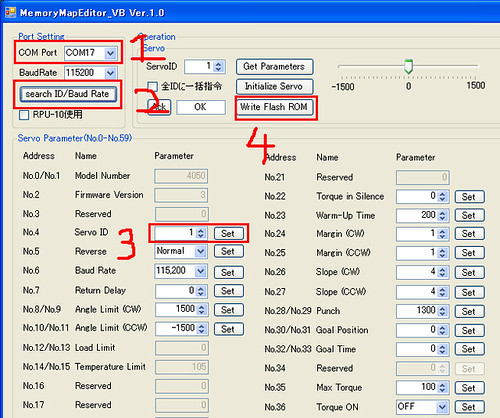
RSC_U485 servo = new RSC_U485("COM17", 115200);
System.out.println("ID1のサーボのトルクをオン");
servo.torque(1, true);
System.out.println("最高速度で100度の位置へ回転");
servo.move(1, 1000, 0);
try {
Thread.sleep(500);//しばし待つ
} catch (InterruptedException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
System.out.println("現在角度:"+servo.getAngle(1));
System.out.println("1秒かけて0度の位置へ");
servo.move(1, 0, 100);
try {
Thread.sleep(1000);//しばし待つ
} catch (InterruptedException e) {
// TODO Auto-generated catch block
e.printStackTrace();
}
System.out.println("現在角度:"+servo.getAngle(1));
}
ちなみにJavaとPythonで書いたのはWindowsからもUbuntuからも制御したかったのが理由なのですが,Ubuntu 9.10 では RS-U485 を
# modprobe ftdi_sio vendor=0x1115 product=0x0008
で認識しました.
import com.citumpe.ctpTools.jWMI;とインポートし,
try {
// COMポートの詳細な名前を教えてもらう
String name = jWMI.getWMIValue(
"Select Caption from Win32_SerialPort", "Caption");
System.out.println(name);
} catch (Exception e) {
// TODO 自動生成された catch ブロック
e.printStackTrace();
}
という風に使ったら,通信ポート (COM1) Silicon Labs CP210x USB to UART Bridge (COM33) URG Series USB Device Driver (COM31)てな感じで返ってきた…んですけど,モノによって出てこないものがあります.
name = jWMI.getWMIValue("Select Caption from Win32_PnPEntity", "Caption");
としたら,今まででてこなかったものも表示されました.